Como mencionei no post sobre game Genius com Arduino, estou compartilhando aqui no blog alguns dos experimentos que realizei na minha pesquisa no Programa de Iniciação Científica da faculdade. Esse, é mais um deles.
O MeArm (braço robótico) é um projeto muito popular em cursos de introdução a robótica, cursos técnicos e projetos de graduação. Por ser de baixo custo e fácil adaptação, ele pode servir de base para uma infinidade de aplicações.
Há uma grande leque de opções a venda. Em uma pesquisa rápida no mercado livre por “braço robótico” você pode encontrar modelos de que variam de R$40 a R$300. Essa diferença de valores se deve ao material (MDF, acrílico, metal...) e aos componentes eletrônicos (motores, Arduino, controles…) que podem vir juntos ou não.
Segue a lista de componentes necessários:
- Arduino Uno R3 com cabo USB
- Protoboard
- Kit de Chassi Braço Robótico
- 4 Servo Motores
- 2 Joysticks Arduino 3 Eixos
- Jumpers
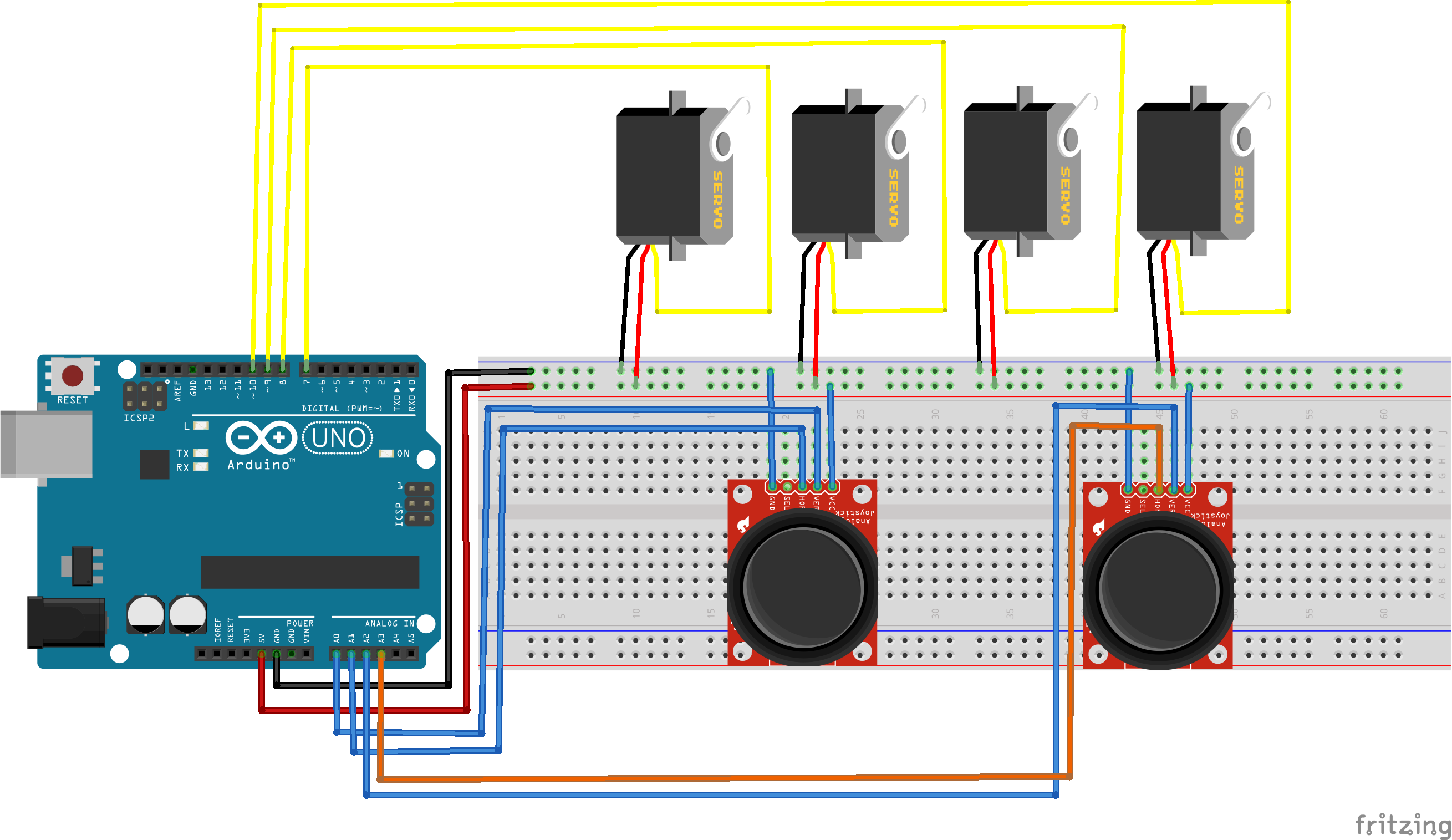
A programação é bem simples, apenas atente que é necessário importar a biblioteca servo.h. Uma biblioteca nativa do próprio Arduino para controle de servo motores.
Código:
Créditos da imagem do MeArm: Amazon.
06-08-2018 | Update:
Links para quem quiser baixar o projeto no Github e simular no Tinkercad (obs.: o Tinkercad não possui todos os componentes, por isso o projeto está adaptado lá, porém o código é o mesmo).
11-12-2019 | Update:
Para quem quer aprender um pouco mais e se aventurar em novos projetos, sugiro dar uma conferida no Brain. Que é o blog da loja de componentes eletrônicos Eletrogate. Eles possuem um conteúdo bem rico sobre Arduino, além de tutoriais super bacanas.